
Arduinoの始動機のキット、コントローラ ボード、センサー モジュールの工場
DIYの教育プログラマブル ロボットは製造業者を写し出します
 |
| 起源の場所: | 広東省の中国(本土) |
| ブランド名: | Oky Newstar |
| モデル番号: | oky3431 |
| 最小注文数量: | 1 /関連キーワード |
|---|---|
| 受渡し時間: | 支払の後の 3-5 仕事日 |
| 支払条件: | L / Cの開発/のD / Pは、T / Tは、ウェスタンユニオン、マネーグラム |
| 供給の能力: | 日あたり1000ピース/ピース |
| パックのサイズ: | 5cm x 4cm x 3cm | 重量: | 50グラム |
|---|---|---|---|
| モジュール: | この回転は限られていません数えます。 | 回転式エンコーダー: | 先に回転によって数えることができます |
| ハイライト: | Arduino のための盾,arduino センサーのキット |
||
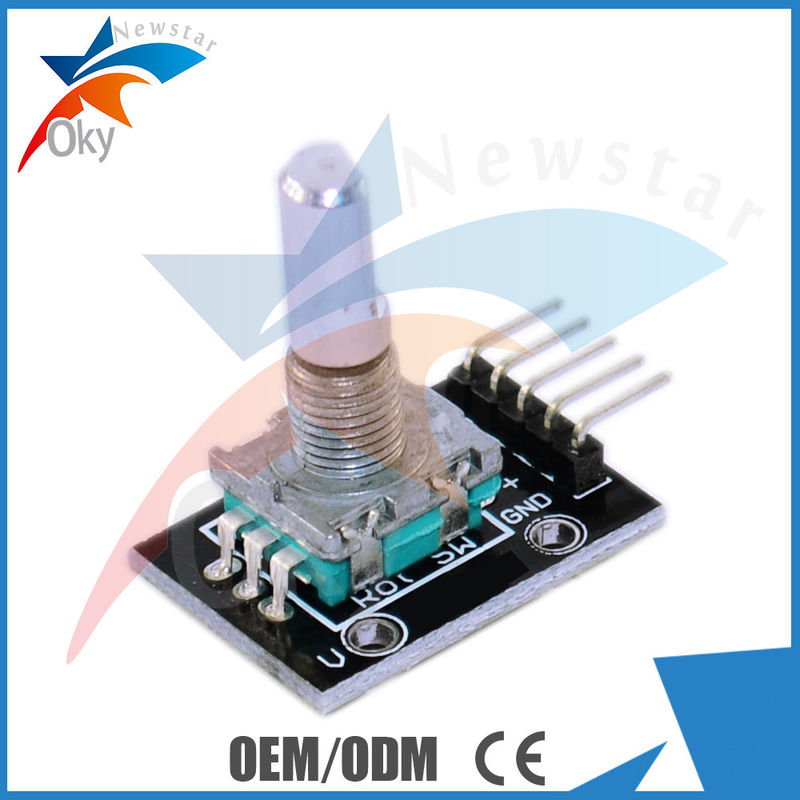
デモ コードのArduinoのための磁気回転式エンコーダー モジュール
デモ コードのarduinoのための回転式エンコーダー モジュール
指定:
回転式エンコーダーは出力脈拍の頻度の回転の間に前方および反対方向を回すことによって数えることができます
反対の回転電位差計とは違って、この回転は限られていません数えます。
回転式エンコーダーのボタンを使うと0から数え始めますその初期状態に再調節することができます。
******************
ARDUINOのテスト コード:
const intのinterruptA = 0;//割り込み0 (ピン2)
const intのinterruptB = 1;//割り込み1 (ピン3)
int CLK = 2;//PIN2
int DAT = 3;//PIN3
intボタン= 4;//PIN4
int LED1 = 5;//PIN5
int LED2 = 6;//PIN6
intの計算= 0;
無効の組み立て()
{
attachInterrupt (interruptA、下るRoteStateChanged);
//AttachInterrupt (落ちるinterruptB、buttonState);
pinMode (CLKの入力);
digitalWrite (2、高い);//引き高いRestance
pinMode (DATの入力);
digitalWrite (3、高い);//引き高いRestance
pinMode (ボタン、入力);
digitalWrite (4、高い);//引き高いRestance
pinMode (LED1の出力);
pinMode (LED2の出力);
Serial.begin (9600);
}
無効のループ()
{
(!(digitalRead (ボタン)))
{
計算= 0;
Serial.println (「停止計算= 0");
digitalWrite (LED1、低い);
digitalWrite (LED2、低い);
遅れ(2000年);
}
Serial.println (計算);
}
/ /-------------------------------------------
RoteStateChangedの無効の()//時CLK下る読まれたDAT
{
(digitalRead (DAT))//DATが=高い前方である時
{
計算;
digitalWrite (LED1、高い);
digitalWrite (LED2、低い);
遅れ(20);
}
DATが=低いBackRoteである時他に//
{
計算-;
digitalWrite (LED2、高い);
digitalWrite (LED1、低い);
遅れ(20);
}
}
工場映像
![]()
比較優位:
1. 便利で及び友好的なカスタマー サービス
2.低価格は工場製造者から指示します
3.世界中の速い配達。
4.全体的な標準と良質。
5. 1年の工場保証
6.金庫の船積みの方法および支払
コンタクトパーソン: Ms. Erica Teng
電話番号: +8613410424757





